Frontiers Pronto: A Multi-Sensor State Estimator for Legged
Por um escritor misterioso
Descrição

PDF] A Factor Graph Approach to Multi-camera Extrinsic Calibration

PDF] Wolf: A Modular Estimation Framework for Robotics Based on

PDF] Hybrid Contact Preintegration for Visual-Inertial-Contact

PDF] Wolf: A Modular Estimation Framework for Robotics Based on
Frontiers Pronto: A Multi-Sensor State Estimator for Legged
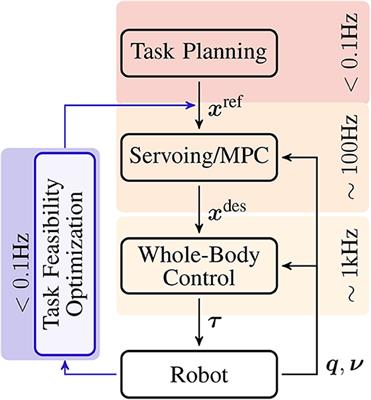
Frontiers Task Feasibility Maximization Using Model-Free Policy

PDF] Robust Legged Robot State Estimation Using Factor Graph
GitHub - ori-drs/pronto: Pronto - Legged Robot State Estimator
Machines, Free Full-Text

PDF] On the Use of Torque Measurement in Centroidal State

PDF] Pronto: A Multi-Sensor State Estimator for Legged Robots in

PDF] Robust Legged Robot State Estimation Using Factor Graph
Machines, Free Full-Text
Perception for Humanoid Robots
de
por adulto (o preço varia de acordo com o tamanho do grupo)